
近日,东南大学建筑学院张宏教授团队在机器人场地建造规划控制邻域取得新进展,研究成果以“Data linking and interaction between BIM and robotic operating system (ROS) for flexible construction planning”为题,在工程技术领域的顶级期刊AUTOMATION IN CONSTRUCTION《建筑自动化》在线发表。
近年来,机器人建造因其可以代替工人实现危险作业,提高装配式建造中的施工效率,对建筑机器人的相关研究是智能建造领域的重要研究方向。与传统的建造管理规划方式不同,机器人建造需要面向对象的精确信息(如位置、速度、力)才能可靠地执行任务。这需要通过数据化建筑设计明确建筑与建造的设计信息并实现面向构件层面的建筑信息与建造信息的关联。现有研究侧重于面向机器人的施工过程,但缺乏与建筑和施工信息的实时规划整合。
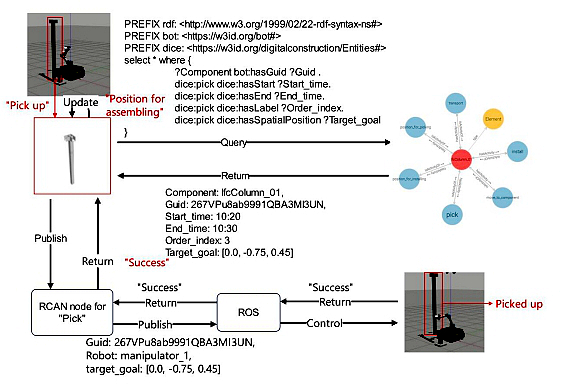
为了解决建筑建造信息在机器人建造中的孤岛问题,以及施工信息无法直接用于建筑机器人控制的难题,该研究创新性地提出了“机器人施工动作节点(RCAN)”的概念。RCAN作为基于BIM的智能组件与机器人操作系统(ROS)之间的中间层系统,能够将传统建造规划转化为有序活动,实现基于openBIM的IFC格式建筑与建造信息的数据关联。该方法通过语义网技术构建了建筑信息与建造规划信息间面向构件的数据关联,实现了建筑设计的BIM模型信息和建造设计的施工流程信息等多源异构信息在机器人建造任务分配和行为规划中的有效使用,弥补了建筑建造设计阶段信息在机器人实际建造中无法传递并难以有效识别的问题。
该科研成果将在今年8月举办的可持续未来挑战赛(Sustainable Future Challenge)的曲面建筑智能建造中得到综合体现,探索基于BIM数据引导下的建筑机器人在复杂施工场地中的真实应用。
论文的第一作者和通讯作者为东南大学建筑学院博士后朱爱宇,张宏教授为第四作者,东南大学为唯一通讯单位。该工作得到了国家留学基金委的资助。
论文链接:https://www.sciencedirect.com/science/article/pii/S0926580524001626
研究内容网站:https://solarark.net
供稿:建筑学院


